LC 123 J. 5116
SESSION 2001
______
Filière Physique - Chimie
______
PHYSIQUE
(Épreuve commune aux ENS: Lyon et Cachan)
Durée : 5 heures
______
L'usage de calculatrices électroniques de poche à alimentation autonome, non imprimantes et sans document d'accompagnement, est autorisé. Cependant, une seule calculatrice à la fois est admise sur la table ou le poste travail, et aucun échange n'est autorisé entre les candidats.
Un liquide contenant des particules microscopiques en suspension diffuse la lumière incidente dans toutes les directions. Un objet immergé dans un tel liquide n'est donc pas toujours visible à l'oeil nu. Il peut cependant être détecté par l'analyse du rayonnement transmis dans la direction d'incidence. L'intérêt de cette détection, en imagerie biomédicale par exemple, justifie l'étude du rayonnement diffusé. Dans ce problème, on étudie la diffusion de lumière dans un milieu modèle constitué par une suspension dans l'eau de sphères de polystyrène microscopiques.
Dans la première partie, on étudie le principe d'un modulateur acousto-optique, qui permet de décaler la fréquence d'une onde optique en lui faisant traverser un cristal parcouru par une onde acoustique.
La deuxième partie est consacrée à l'étude d'un dispositif expérimental, utilisant entre autres le modulateur étudié dans la première partie, et permettant l'étude quantitative du phénomène.
On s'intéresse dans la troisième partie au calcul du champ électromagnétique diffusé par une unique sphère de polystyrène, ce qui permet de justifier l'expression de la section efficace de diffusion utilisée dans la deuxième partie.
Les trois parties sont largement indépendantes.
Il est demandé aux candidats de rappeler les numéros identifiant une question avant la solution qu'ils proposent.
Tournez la page S.V.P.
• On utilise pour les fonctions sinusoïdales du temps la notation complexe. La fonction réelle $x = {X_m}\cos (\omega t + \varphi )$ sera notée, en omettant, pour alléger l'écriture, le symbole Re (partie réelle) :
$x = {X_m}\exp \left[ {i(\omega t + \varphi )} \right]$
L'amplitude complexe X de x est définie par :
$\underset{\scriptscriptstyle-}{X}={{X}_{m}}\exp (i\varphi )$
On rappelle que la valeur moyenne sur une période $T = \frac{2\pi }{ \omega }$ du produit de deux fonctions sinusoïdales ${x_1}(t) = {X_{1m}}\cos (\omega t + {\varphi _1})$ et ${x_2}(t) = {X_{2m}}\cos (\omega t + {\varphi _2})$ s'exprime simplement en fonction de leurs amplitudes complexes :
$\frac{1}{T}\int_{0}^{T}{{{x}_{1}}(t)\ {{x}_{2}}(t)\ dt=}\frac{1}{2}R\text{e}\left[ {{{\underset{\scriptscriptstyle-}{X}}}_{1}}\underset{\scriptscriptstyle-}{X}_{2}^{*} \right]=\frac{1}{2}R\text{e}\left[ \underset{\scriptscriptstyle-}{X}_{1}^{*}{{{\underset{\scriptscriptstyle-}{X}}}_{2}} \right]$
où ${{\underset{\scriptscriptstyle-}{X}}^{*}}$ désigne le complexe conjugué de X.
• La notation sinc désigne le sinus cardinal défini par : ${\rm{sinc}}(x) = \frac{\sin (x)}{x}$.
• c désigne la vitesse de la lumière dans le vide, ${\varepsilon _0}$ la permittivité du vide, et ${\mu _0}$ la perméabilité du vide.
$\overrightarrow {{\rm{rot}}} \,(f\,\vec A) = f\,\overrightarrow {{\rm{rot}}} \,\vec A + \overrightarrow {{\rm{grad}}} (f)\, \wedge \,\vec A$ (2)
I Modulateur acousto-optique
I.A
On considère deux milieux diélectriques, non magnétiques, homogènes et isotropes, d'indices de réfraction n1 et n2 . Le milieu d'indice n1 occupe le demi-espace z < 0 , le milieu d'indice n2 le demi-espace z > 0. Le plan z = 0 constitue ainsi un dioptre plan.
Une onde plane progressive, monochromatique de pulsation ω , se propage dans le milieu d'indice n1 . Le champ électrique ${\vec E_i}$ de cette onde est polarisé rectilignement selon ${\vec e_y}$ ; son vecteur d'onde ${\vec k_i}$ fait avec Oz un angle i (angle d'incidence). On admet que les ondes réfléchies et transmises par le dioptre sont planes, monochromatiques de pulsation ω , de champs électriques ${\vec E_r}$ et ${\vec E_t}$ polarisés selon ${\vec e_y}$.
Les champs électriques, à l'instant t et au point M de l'espace, sont écrits sous la forme
${\vec E_i}(\vec r,t) = {E_0}\,\exp \left[ {i(\omega t - {{\vec k}_i}\,.\,\vec r)} \right]{\vec e_y}$ (3)
${\vec E_r}(\vec r,t) = R\,{E_0}\,\exp \left[ {i(\omega t - {{\vec k}_r}\,.\,\vec r)} \right]{\vec e_y}$ (4)
${\vec E_t}(\vec r,t) = T\,{E_0}\,\exp \left[ {i(\omega t - {{\vec k}_t}\,.\,\vec r)} \right]{\vec e_y}$ (5)
ce qui définit les coefficients de réflexion R et de transmission T en amplitude.
I.A.1 Rappeler, sans les démontrer, les relations de passage du champ électromagnétique à la traversée du dioptre, qu'on exprimera pour $\vec E$ et $\vec B$.
I.A.2 En déduire les lois de la réflexion et de la réfraction de Snell-Descartes (on désignera par i' l'angle de réfraction).
I.A.3 Calculer R en fonction de n1 , n2 , i et i'.
I.A.4 On considère dans toute la suite que les indices n1 et n2 sont très proches, et on pose:
$n = {n_1} \approx {n_2}$ ,$\delta n = {n_2} - {n_1}$ et $\theta = \frac{\pi}{2 - i}$.
Montrer que le coefficient de réflexion s'écrit alors
$R = - \frac{{\delta n}}{{2n{{\sin }^2}(\theta )}}$ (6)
I.B
On se propose maintenant de montrer que l'onde réfléchie sur un dioptre en mouvement voit sa fréquence décalée par effet Doppler.
I.B.1 Le référentiel R étant associé au trièdre (Oxyz), on considère le référentiel R' en translation par rapport à R à la vitesse $ - V{\vec e_z}$ , auquel on associe le trièdre (O'xyz) avec $\overrightarrow {OO'} = - \,Vt{\vec e_z}$ .
La vitesse V est suffisamment faible devant la vitesse c de la lumière pour que l'on puisse négliger les effets relativistes et considérer que le champ électrique en un point M à l'instant t a la même valeur dans les deux référentiels R et R' .
Le champ électrique d'une onde s'écrit dans R :
$\vec E(\vec r,t) = {E_0}\exp \left[ {i(\omega t - \vec k\,.\,\vec r)} \right]{\vec e_y}$ (7)
Montrer que, dans R' , si l'on pose $\vec r' = \overrightarrow {O'M} $ , ce champ peut s'écrire:
$\vec E(\vec r',t) = {E_0}\exp \left[ {i(\omega 't - \vec k'\,.\,\vec r')} \right]{\vec e_y}$ (8)
et déterminer $\omega '$ et $\vec k'$ en fonction de ω , $\vec k$ et V .
I.B.2 Le dioptre considéré en (I.A.) est éclairé dans les mêmes conditions, mais il se translate maintenant à la vitesse $ - V{\vec e_z}$ , par rapport au référentiel R .
Montrer que, dans R , la pulsation ${\omega _r}$ de l'onde réfléchie est différente de la pulsation ${\omega _i}$ de l'onde incidente, et que le décalage $\Delta \omega = {\omega _r} - {\omega _i}$ vaut :
$\Delta \omega = \frac{{2nV\sin (\theta )}}{c}\omega $ (9)
I.C
Pour réaliser expérimentalement un dispositif permettant, sur ce principe, de décaler la fréquence d'une onde électromagnétique, on peut utiliser la propagation d'une onde acoustique dans un cristal. Une onde acoustique plane, de fréquence f et de longueur d'onde Λ , se propageant selon Oz dans la direction z < 0, induit une modulation de l'indice de réfraction du cristal autour d'une valeur moyenne nc selon :
$n(z,t) = {n_c} + \Delta n\cos \left[ {2\pi \left( {ft + \frac{z}{\Lambda }} \right)} \right]$ (10)
avec $\Delta n > 0$ et $\Delta n < < {n_c}$. Tournez la page S.V.P.
Pour décrire l'interaction entre l'onde électromagnétique et l'onde acoustique, on adopte le modèle suivant, qui rend correctement compte des observations expérimentales. Le cristal est considéré comme une juxtaposition de petites tranches d'épaisseur $\delta z$ très inférieure à Λ , et donc d'indice pratiquement uniforme. Entre deux tranches successives, il y a un saut d'indice $\delta n = \frac{{\partial n}}{{\partial z}}\delta z$: chaque interface entre deux tranches élémentaires constitue un dioptre plan. Du fait de la propagation de l'onde acoustique, chacun de ces dioptres se déplace à vitesse $\vec V = - \,V{\vec e_z}$ constante.
Le cristal occupe la région de l'espace comprise entre les plans x = -e/2 et x = +e/2 ; on le suppose de grandes dimensions selon Oy et Oz . Le milieu extérieur, homogène, est d'indice na . Les faces x = -e/2 et x = +e/2 subissent un traitement anti-reflets : on considérera que les coefficients de transmission à travers ces faces sont égaux à 1.
On éclaire la face x = -e/2 du cristal par une onde plane, de champ électrique
${\vec E_i}(\vec r,t) = {E_0}\exp \left[ {i(\omega t - {{\vec k}_i}\,.\,\vec r)} \right]{\vec e_y}$ (11)
dont le vecteur d'onde ${\vec k_i}$ fait un angle ${\theta _a}$ avec ${\vec e_x}$.
L'amplitude Δn de la variation d'indice étant très faible devant nc , l'onde réfractée dans le cristal s'y propage presque comme si l'indice était uniformément nc , : elle est quasi plane, de vecteur d'onde ${\vec k_c}$ faisant avec ${\vec e_x}$ un angle ${\theta _c}$ d'amplitude pratiquement constante et égale à E0. Cependant, chaque interface entre deux tranches élémentaires du cristal réfléchit une onde élémentaire, d'amplitude très faible devant E0 (figure 1). Ces ondes élémentaires émergent du cristal en x = +e/2. Leur superposition, dans l'air, constitue l'onde réfléchie.
 I.C.1 On considère un plan Σ orthogonal à la direction de l'onde réfléchie. Calculer, au niveau de Σ , le déphasage $\varphi ({z_i})$ entre l'onde élémentaire réfléchie par l'interface z = zi et celle réfléchie en z = 0. On exprimera $\varphi ({z_i})$ en fonction de la longueur d'onde λ0 dans le vide de l'onde incidente et on négligera évidemment pour ce calcul la célérité des ondes acoustiques devant celle de la lumière.
I.C.1 On considère un plan Σ orthogonal à la direction de l'onde réfléchie. Calculer, au niveau de Σ , le déphasage $\varphi ({z_i})$ entre l'onde élémentaire réfléchie par l'interface z = zi et celle réfléchie en z = 0. On exprimera $\varphi ({z_i})$ en fonction de la longueur d'onde λ0 dans le vide de l'onde incidente et on négligera évidemment pour ce calcul la célérité des ondes acoustiques devant celle de la lumière.
I.C.2 Les interfaces atteintes par l'onde incidente sont comprises entre z = -L/2 et z = +L/2. Montrer que l'amplitude complexe du champ total réfléchi peut se mettre sous la forme .
$\underset{\scriptscriptstyle-}{E}=K\exp (i\psi )\left\{ \exp \left[ i\alpha (t) \right]\text{sinc}\left[ \pi \text{L}\left( \frac{\text{1}}{\Lambda }-\frac{2{{n}_{a}}\sin ({{\theta }_{a}})}{{{\lambda }_{0}}} \right) \right]-\exp \left[ -i\alpha (t) \right]\text{sinc}\left[ \pi \text{L}\left( \frac{\text{1}}{\Lambda }+\frac{2{{n}_{a}}\sin ({{\theta }_{a}})}{{{\lambda }_{0}}} \right) \right] \right\}$
où K est un réel positif et $\psi $ un déphasage arbitraire dépendant du choix de Σ .
Préciser les expressions de K et α(t) en fonction des données.
I.C.3 Montrer que les deux termes contribuant à l'amplitude du champ réfléchi sont respectivement maximaux pour deux valeurs de ${\theta _a}$ opposées, notées respectivement ${\theta _B}$ et $ - {\theta _B}$ (angles de Bragg). On négligera pour cela la variation de K avec ${\theta _a}$ , et on justifiera a posteriori cette approximation, compte tenu des ordres de grandeur des différents paramètres
$L \approx 1mm$ $\Lambda \approx 50\mu m$ ${n_c} \approx 2$ ${\lambda _0} \approx 600nm$
Représenter l'allure de la variation avec sin(${\theta _a}$) de l'intensité lumineuse émergente.
I.C.4 Vérifier qu'à l'incidence de Bragg les ondes élémentaires réfléchies par l'interface en z = zi et par celle en z = zi + Λ interférent constructivement.
I.C.5 On envisage séparément ${\theta _a} = + {\theta _B}$ et${\theta _a} = - {\theta _B}$ représentés sur la figure 2 :
 Montrer que l'onde optique réfléchie est décalée en fréquence de
Montrer que l'onde optique réfléchie est décalée en fréquence de
$\frac{{\Delta \omega }}{{2\pi }} = \pm f$
avec un signe que l'on précisera pour chacune des deux configurations, et expliquer pourquoi ce décalage de fréquence est cohérent avec le résultat établi à la question (I.B.2).
Il Etude d'un dispositif expérimental
Un interféromètre de Mach-Zehnder, représenté sur la figure 3, est constitué de deux lames semi-transparentes identiques (LE ) et (LS ), et de deux miroirs de renvoi (M1) et (M2).
On éclaire la lame d'entrée (LE) par le faisceau d'un laser hélium-néon, de longueur d'onde dans le vide λ0 = 632, 8 nm et de pulsation $\omega = \frac{2\pi c}{{\lambda }_{0}}$.
Le faisceau transmis par (LE ) traverse ensuite un modulateur acousto-optique, du type de celui étudié dans la première partie, dont l'effet est de décaler la fréquence du rayonnement. Ce modulateur est alimenté par un générateur de radiofréquences (R.F) , de fréquence f = 50 MHz, qui délivre un signal $m(t) = {m_0}\cos (2\pi \,ft)$ . Les ondes acoustiques produites ont ainsi la fréquence f . Comme on l'a montré dans la première partie, l'onde lumineuse émergeant du modulateur a alors pour pulsation $\omega + \Delta \omega $ , avec :
$\Delta \omega = 2\pi \,f$
Le faisceau est ensuite réfléchi sur (M1 ) puis sur (LS ). On désignera dans la suite par "bras de référence" le bras correspondant de l'interféromètre. Dans l'autre bras, que l'on appelera "bras de mesure", le faisceau réfléchi par (LE) est ensuite réfléchi par (M2) puis transmis par (Ls)
Tournez la page S.V.P.
 L'interféromètre est réglé de telle façon que les deux faisceaux soient ensuite superposés au niveau d'un détecteur, qui délivre un signal électrique s(t) proportionnel à la puissance totale P(t) qu'il reçoit sur sa fenêtre d'entrée :
L'interféromètre est réglé de telle façon que les deux faisceaux soient ensuite superposés au niveau d'un détecteur, qui délivre un signal électrique s(t) proportionnel à la puissance totale P(t) qu'il reçoit sur sa fenêtre d'entrée :
$s(t) = \eta P(t)$ (12)
II.A
La fenêtre d'entrée du détecteur est un carré de côté b, orthogonal à Oz et correspondant dans le plan Oxy à -b/2 < x < +b/2 et -b/2 < y < +b/2.
On désigne par ${\vec E_0}$ le champ électrique de l'onde provenant du bras de référence, et par ${\vec E_1}$ le champ provenant du bras de mesure. Au niveau du détecteur, ces deux champs s'écrivent :
${\vec E_0}(\vec r,t) = {E_0}\exp i\left[ {(\omega + \Delta \omega )t - {{\vec k}_0}\,.\,\vec r + {\varphi _0}} \right]{\vec e_y}$ (13)
${\vec E_1}(\vec r,t) = {E_1}\exp i\left[ {\omega t - {{\vec k}_1}\,.\,\vec r + {\varphi _1}} \right]{\vec e_y}$ (14)
On notera I0 et I1 les intensités correspondantes.
II.A.1 On suppose que les deux faisceaux émergeant de l'interféromètre sont parfaitement alignés, se propageant selon Oz. Calculer s(t) en fonction de I0 et I1 et montrer que l'on doit détecter un signal de battement à la fréquence f.
II.A.2 Du fait de l'inévitable imperfection du réglage de l'interféromètre, les faisceaux font en réalité entre eux un petit angle α , au niveau du détecteur. On considérera, par exemple, que l'un des faisceaux arrive sur la fenêtre sous incidence normale et l'autre sous incidence α . Que devient l'amplitude du signal de battement détecté ? Conclure.
II.A.3 La largeur de la fenêtre est b = 2 mm. Quelle valeur de l'angle α entre les deux faisceaux peut-on tolérer pour ne pas être gêné par le problème mis en évidence à la question précédente ? On supposera dans la suite que l'alignement est convenablement réalisé.
II.B
On cherche maintenant à mesurer l'amplitude du signal de battement à l'aide du dispositif électronique schématisé sur la figure 4, qui comprend deux multiplieurs analogiques et un filtre passe-bas de fréquence de coupure fC .
Les signaux d'entrée du premier multiplieur sont le signal s(t) délivré par le photodétecteur et le signal de référence m(t) délivré par le générateur RF qui alimente aussi le modulateur.
 II.B.1 Montrer qu'un choix judicieux de la valeur de fc, permet d'obtenir un signal de sortie S1 proportionnel à I1 .
II.B.1 Montrer qu'un choix judicieux de la valeur de fc, permet d'obtenir un signal de sortie S1 proportionnel à I1 .
II.B.2 Le signal S1 est très sensible aux perturbations extérieures, et peut varier simplement parce que l'on tapote un des miroirs de renvoi de l'interféromètre. Expliquer pourquoi.
Pour remédier à cet inconvénient, on produit un signal S2 à l'aide d'un dispositif électronique parfaitement similaire, mais en remplaçant à l'entrée du premier multiplieur la référence m(t) par $m'(t) = {m_0}\sin (2\pi \,ft)$.
II.B.3 Comment peut-on, en pratique, obtenir le signal $m'(t)$ à partir du signal m(t) ?
II.B.4 Montrer que l'on peut effectivement, en utilisant S1 et S2 , produire un signal S qui ne soit plus aussi sensible aux perturbations extérieures et qui soit toujours proportionnel à I1 .
II.C
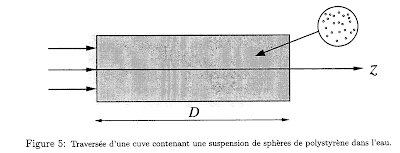
On introduit dans le bras de mesure de l'interféromètre une cuve remplie d'une suspension de sphères de polystyrène microscopiques dans l'eau (figure 5). L'épaisseur de liquide traversée par le faisceau, dans la direction Oz , est D = 10 cm : la lumière pénètre dans la cuve en z = 0 et en ressort en z = D . L'indice de l'eau pour la longueur d'onde λ0 est ne = 1,33 ; celle du polystyrène np = 1,59. Chaque sphère diffuse la lumière, ce qui confère au liquide un aspect laiteux.
II.C.1 Expliquer pourquoi on n'attend pas, au niveau du détecteur, de signal de battements entre la lumière diffusée par la cuve et le faisceau de référence.
Quel problème de cohérence se pose-t-il ici ? On pourra s'appuyer sur les résultats de (II.A).
On observe cependant un phénomène de battements, mais il correspond aux interférences entre le faisceau de référence et la partie de la lumière qui a traversé la cuve en ligne droite et émerge dans la direction d'incidence. On appelle intensité cohérente IC l'intensité lumineuse correspondant à cette lumière. Le signal S permet de mesurer directement l'intensité cohérente IC à la sortie de la cuve.
Tournez la page S.V.P.
 II.C.2 Montrer que, à l'intérieur de la cuve, IC est fonction de z et vérifie l'équation :
II.C.2 Montrer que, à l'intérieur de la cuve, IC est fonction de z et vérifie l'équation :
$\frac{{d\,{I_c}(z)}}{{dz}} = - v\,{\sigma _d}\,{I_c}(z)$ (15)
où v est le nombre de sphères par unité de volume et ${\sigma _d}$ la section efficace de diffusion, définie comme le rapport entre la puissance Pd diffusée par une sphère et l'intensité incidente Ic sur cette sphère :
${\sigma _d} = \frac{{{P_d}}}{{{I_c}}}$ (16)
En déduire que l'intensité cohérente Ic(D) à la sortie de la cuve vérifie :
${I_c}(d) = {I_{c0}}\exp ( - v{\kern 1pt} {\sigma _d}{\kern 1pt} D)$ (17)
Que représente ${I_{c0}}$ ?
II.C.3 Le tableau 1 donne les valeurs expérimentales de $\ln \left[ {\frac{{{I_c}(D)}}{{{I_{c0}}}}} \right]$ mesurées pour différentes
valeurs de la fraction volumique de polystyrène, c'est-à-dire du rapport entre le volume de polystyrène et le volume total de la solution :
 Commenter ces valeurs numériques.
Commenter ces valeurs numériques.
La section efficace de diffusion ${\sigma _d}$ est fonction de ne , np , λ0 et du volume V des sphères:
${\sigma _d} = 24{\pi ^3}{\left( {\frac{{{n_e}}}{{{\lambda _0}}}} \right)^4}{\left( {\frac{{n_p^2 - n_e^2}}{{n_p^2 + 2n_e^2}}} \right)^2}{V^2}$ (18)
Déterminer le rayon a des sphères utilisées.
II.C.4 Les incertitudes relatives sur les mesures des intensités sont de 1 % ; celles sur les fractions volumiques de 0,5 %. Evaluer l'incertitude Δa sur le rayon des sphères.
III Diffusion de la lumière par une particule sphérique
Dans cette partie, on se propose de justifier l'expression de la section efficace de diffusion ${\sigma _{\rm{d}}}$ utilisée à la question (II.C.3).
III.A
On considère une sphère, de rayon a , de polarisation $\vec P$ uniforme, dans le vide. On veut calculer le champ électrostatique créé par cette distribution de polarisation.
III.A.1 Montrer que le champ créé par la polarisation $\vec P$ est identique à celui que créerait une distribution surfacique de charges ${\sigma _{{\rm{lié }}}}$ , que l'on précisera.
III.A.2 Montrer que l'on peut retrouver cette distribution surfacique de charges en superposant deux sphères de même rayon a , uniformément chargées, de densité volumique de charge respectivement + ρ et - ρ, centrées en deux points infiniment voisins, respectivement O+ et O- Etablir la relation liant $\vec P$, ρ , O+ et O- .
III.A.3 Donner l'expression du potentiel électrostatique Vρ créé en tout point M de l'espace par une sphère de rayon a et de centre O, de densité de charge uniforme ρ . On prendra le potentiel nul lorsque M est à l'infini.
III.A.4 Déduire des résultats précédents l'expression du potentiel ${V_{\vec P}}$ à l'intérieur de la sphère uniformément polarisée; montrer que le champ ${\vec E_{\vec P}}$ orrespondant est uniforme et vaut :
${\vec E_{\vec P}} = - \frac{{\vec P}}{{3{\varepsilon _0}}}$ (19)
III.B
On considère maintenant une sphère de polystyrène, de rayon a et de centre O , dans le vide. Le polystyrène est un matériau isotrope, d'indice de réfraction nP ; on notera εp sa permittivité diélectrique absolue.
On envoie sur la sphère une onde électromagnétique plane, monochromatique de pulsation ω, de champ électrique :
${\vec E_i}(\vec r,t) = {\vec E_{i0}}\exp \left[ {i(\omega t - \vec k\,.\,\vec r)} \right]$ (20)
On cherche à déterminer le champ électromagnétique $({\vec E_d},{\vec B_d})$ diffusé par la sphère, et défini par les relations :
$\vec E = {\vec E_i} + {\vec E_d}$ et $\vec B = {\vec B_i} + {\vec B_d}$ (21)
où $(\vec E,\vec B)$ représente le champ électromagnétique total et $({\vec E_i},{\vec B_i})$ le champ incident.
III.B.1 On note $({\vec E^{{\mathop{\rm int}} }},{\vec B^{{\mathop{\rm int}} }})$ et $({\vec E^{{\rm{ext}}}},{\vec B^{{\rm{ext}}}})$ les champs respectivement à l'intérieur et à l'extérieur de la sphère.
Ecrire les équations de Maxwell pour ces champs.
III.B.2 Exprimer les relations de passage vérifiées par $\vec E$ et $\vec B$ à la surface de la sphère.
III.B.3 Vérifier que, à l'extérieur de la sphère, le champ diffusé $({\vec E_d},{\vec B_d})$ vérifie simplement les équations de Maxwell dans le vide.
Tournez la page S.V.P.
III.B.4 Montrer que, à l'intérieur de la sphère, le champ diffusé vérifie aussi les équations de Maxwell dans le vide, à condition d'y introduire une distribution volumique de courant ${\vec j_{{\rm{lié }}}}$ dont on exprimera l'amplitude complexe ${{\underset{\scriptscriptstyle-}{\vec{j}}}_{\text{li }\!\!\acute{\mathrm{e}}\!\!\text{ }}}$ en fonction de celle du champ total ${\vec E^{{\mathop{\rm int}} }}$ à l'intérieur de la sphère.
III.B.5 Montrer qu'on peut alors considérer le champ diffusé comme le champ créé dans le vide par la distribution de courant ${\vec j_{{\rm{li\'e }}}}$ à condition de rajouter une distribution surfacique de charges ${\sigma _{{\rm{li\'e }}}}$ que l'on déterminera.
III.B.6 Montrer enfin que le champ créé par cette distribution de charges et de courants est équivalent au champ qui serait créé par une sphère polarisée, de polarisation :
$\vec P = ({\varepsilon _p} - {\varepsilon _0}){\vec E^{{\mathop{\rm int}} }}$ (22)
III.C
On introduit le potentiel scalaire Vd et le potentiel vecteur ${\vec A_{\rm{d}}}$ associés au champ diffusé $({\vec E_d}\,,\,{\vec B_d})$.
On impose à ces potentiels de vérifier, en tout point de l'espace, la condition de jauge de Lorentz :
${\rm{div}}\,({\vec A_{\rm{d}}}) + \frac{1}{{{c^2}}}\frac{{\partial {V_{\rm{d}}}}}{{\partial {\rm{t}}}} = 0$ (23)
On montre, à l'aide des équations de Maxwell, que ${{\underset{\scriptscriptstyle-}{\vec{A}}}_{\text{d}}}$ satisfait l'équation
$\Delta \,{{\vec{A}}_{\text{d}}}+{{\mu }_{0}}{{\varepsilon }_{0}}{{\omega }^{2}}{{\vec{A}}_{\text{d}}}=-{{\mu }_{0}}{{\underset{\scriptscriptstyle-}{\vec{j}}}_{\text{li }\!\!\acute{\mathrm{e}}\!\!\text{ }}}$ (24)
dont la solution est :
${{\underset{\scriptscriptstyle-}{\vec{A}}}_{\text{d}}}(\vec{r})=\frac{{{\mu }_{0}}}{4\pi }\iiint_{\text{espace}}{{{{\underset{\scriptscriptstyle-}{\vec{j}}}}_{\text{li }\!\!\acute{\mathrm{e}}\!\!\text{ }}}}(\vec{r}')\frac{\exp (-ik\left\| \vec{r}-\vec{r}' \right\|}{\left\| \vec{r}-\vec{r}' \right\|}{{d}^{3}}r'$ (25)
où k est le nombre d'onde défini par $k = \frac{2 \pi }{\lambda _{0}} = \frac{\omega}{c}$ . La notation d3 r', représente un volume élémentaire autour du point M' tel que $\overrightarrow {OM'} = \vec r'$ .
III.C.1 Cette solution est appelée solution des potentiels retardés. Pourquoi ?
On a vu en (III.B.4.) que ${\vec j_{{\rm{lié }}}}$ était fonction de $\vec E$ , lequel n'est pas connu a priori puisqu'il dépend de ${\vec E_{\rm{d}}}$ qui dépend lui-même de ${\vec A_{\rm{d}}}$ ... La résolution dans le cas général apparaît donc délicate.
On se limite dans toute la suite au cas particulier plus simple où la sphère est de rayon très petit devant la longueur d'onde du rayonnement : a << λ0 . Cette restriction permet, entre autres, de considérer que le champ incident est pratiquement uniforme à l'intérieur de la sphère. Il est alors tentant de chercher, pour $\vec E$ et ${\vec E_{\rm{d}}}$ une solution correspondant à une polarisation $\vec P$ uniforme dans le volume de la sphère. Il faudra évidemment ensuite vérifier à posteriori la compatibilité de la solution obtenue avec cette hypothèse.
III.C.2 Montrer que, dans ces conditions, l'intégrale permettant le calcul de ${{\underset{\scriptscriptstyle-}{\vec{A}}}_{\text{d}}}^{\operatorname{int}}$ a la même forme
que celle correspondant au potentiel électrostatique créé par une sphère uniformément chargée. En déduire l'expression de ${{\underset{\scriptscriptstyle-}{\vec{A}}}_{\text{d}}}^{\operatorname{int}}$ .
III.C.3 Calculer ${{\underset{\scriptscriptstyle-}{V}}_{\text{d}}}^{\operatorname{int}}$ puis les amplitudes complexes ${{\vec{\underset{\scriptscriptstyle-}{E}}}_{\text{d}}}^{\operatorname{int}}$ et ${{\underset{\scriptscriptstyle-}{\vec{B}}}_{\text{d}}}^{\operatorname{int}}$ des champs diffusés.
III.C.4 Exprimer ${\vec E_{\rm{d}}}^{{\mathop{\rm int}} }$ et ${\vec B_{\rm{d}}}^{{\mathop{\rm int}} }$ en fonction du champ incident ${\vec E_i}$ .
Cette solution est-elle cohérente avec l'hypothèse d'uniformité de $\vec P$ ?
IILD
On cherche maintenant à déterminer le champ ${\vec E_{\rm{d}}}$ diffusé en un point M situé à une distance r de la sphère de polystyrène très grande devant la longueur d'onde : r >> λ0 .
III.D.1 Montrer que la solution des potentiels retardés peut alors s'écrire :
${{\underset{\scriptscriptstyle-}{\vec{A}}}_{\text{d}}}(\vec{r})={{\underset{\scriptscriptstyle-}{\vec{A}}}_{0}}\frac{\exp (-ikr)}{r}$ (26)
ou ${{\underset{\scriptscriptstyle-}{\vec{A}}}_{0}}$ est une constante vectorielle que l'on exprimera en fonction de a et ${{\underset{\scriptscriptstyle-}{\vec{j}}}_{\text{li }\!\!\acute{\mathrm{e}}\!\!\text{ }}}$ .
III.D.2 Pour repérer la position du point M , on introduit le système de coordonnées sphériques de pôle O et d'axe polaire Oz , tel que ${{\underset{\scriptscriptstyle-}{\vec{A}}}_{0}}={{A}_{0}}\,{{\vec{e}}_{z}}$ . On a ainsi $\theta = ({\vec A_0},\vec r)$ . Etablir les expressions de ${{\underset{\scriptscriptstyle-}{V}}_{\text{d}}}$ et ${{\underset{\scriptscriptstyle-}{\vec{E}}}_{\text{d}}}$ en projection sur la base $({\vec e_r},\,{\vec e_\theta },\,{\vec e_\varphi })$ associée.
IILD.3 Montrer qu'au voisinage de $\vec r = {\vec r_0}$ , le champ ${\vec E_{\rm{d}}}$ a pratiquement une structure d'onde plane (on posera $\vec r = {\vec r_0} + \vec \delta $) . En déduire que l'intensité moyenne (puissance surfacique moyenne) diffusée dans la direction de $\vec r$ est proportionnelle à ${{\left\| {{{\underset{\scriptscriptstyle-}{\vec{E}}}}_{\text{d}}} \right\|}^{2}}$ avec un coefficient de proportionnalité que l'on exprimera en fonction de c et ε0 .
IILD.4 Déduire du résultat précédent la puissance moyenne totale ${P_d}$ diffusée par la sphère en fonction de A0 .
III.D.5 En utilisant les relations démontrées en (III.D.1), (III.B.4) et (III.C.4), exprimer ${P_d}$ en fonction de ${{\left\| {{{\underset{\scriptscriptstyle-}{\vec{E}}}}_{i}} \right\|}^{2}}$ .
IILD.6 Exprimer l'intensité Ii du champ incident en fonction de ${{\left\| {{{\underset{\scriptscriptstyle-}{\vec{E}}}}_{i}} \right\|}^{2}}$ . On définit la section efficace de diffusion ${\sigma _{\rm{d}}}$ par :
${P_d} = {\sigma _{\rm{d}}}\,{I_i}$ (27)
Montrer que, si V représente le volume de la sphère de polystyrène, on a:
${\sigma _{\rm{d}}} = 24{\pi ^3}\frac{1}{{\lambda _0^4}}{\left( {\frac{{{\varepsilon _p} - {\varepsilon _0}}}{{{\varepsilon _p} + 2{\varepsilon _0}}}} \right)^2}\,{V^2}$ (28)
IILD.7 Comparer le résultat obtenu à l'expression de ${\sigma _{\rm{d}}}$ donnée en (ILC.3).
SESSION 2001
______
Filière Physique - Chimie
______
PHYSIQUE
(Épreuve commune aux ENS: Lyon et Cachan)
Durée : 5 heures
______
L'usage de calculatrices électroniques de poche à alimentation autonome, non imprimantes et sans document d'accompagnement, est autorisé. Cependant, une seule calculatrice à la fois est admise sur la table ou le poste travail, et aucun échange n'est autorisé entre les candidats.
Un liquide contenant des particules microscopiques en suspension diffuse la lumière incidente dans toutes les directions. Un objet immergé dans un tel liquide n'est donc pas toujours visible à l'oeil nu. Il peut cependant être détecté par l'analyse du rayonnement transmis dans la direction d'incidence. L'intérêt de cette détection, en imagerie biomédicale par exemple, justifie l'étude du rayonnement diffusé. Dans ce problème, on étudie la diffusion de lumière dans un milieu modèle constitué par une suspension dans l'eau de sphères de polystyrène microscopiques.
Dans la première partie, on étudie le principe d'un modulateur acousto-optique, qui permet de décaler la fréquence d'une onde optique en lui faisant traverser un cristal parcouru par une onde acoustique.
La deuxième partie est consacrée à l'étude d'un dispositif expérimental, utilisant entre autres le modulateur étudié dans la première partie, et permettant l'étude quantitative du phénomène.
On s'intéresse dans la troisième partie au calcul du champ électromagnétique diffusé par une unique sphère de polystyrène, ce qui permet de justifier l'expression de la section efficace de diffusion utilisée dans la deuxième partie.
Les trois parties sont largement indépendantes.
Il est demandé aux candidats de rappeler les numéros identifiant une question avant la solution qu'ils proposent.
Tournez la page S.V.P.
- Notations
• On utilise pour les fonctions sinusoïdales du temps la notation complexe. La fonction réelle $x = {X_m}\cos (\omega t + \varphi )$ sera notée, en omettant, pour alléger l'écriture, le symbole Re (partie réelle) :
$x = {X_m}\exp \left[ {i(\omega t + \varphi )} \right]$
L'amplitude complexe X de x est définie par :
$\underset{\scriptscriptstyle-}{X}={{X}_{m}}\exp (i\varphi )$
On rappelle que la valeur moyenne sur une période $T = \frac{2\pi }{ \omega }$ du produit de deux fonctions sinusoïdales ${x_1}(t) = {X_{1m}}\cos (\omega t + {\varphi _1})$ et ${x_2}(t) = {X_{2m}}\cos (\omega t + {\varphi _2})$ s'exprime simplement en fonction de leurs amplitudes complexes :
$\frac{1}{T}\int_{0}^{T}{{{x}_{1}}(t)\ {{x}_{2}}(t)\ dt=}\frac{1}{2}R\text{e}\left[ {{{\underset{\scriptscriptstyle-}{X}}}_{1}}\underset{\scriptscriptstyle-}{X}_{2}^{*} \right]=\frac{1}{2}R\text{e}\left[ \underset{\scriptscriptstyle-}{X}_{1}^{*}{{{\underset{\scriptscriptstyle-}{X}}}_{2}} \right]$
où ${{\underset{\scriptscriptstyle-}{X}}^{*}}$ désigne le complexe conjugué de X.
• La notation sinc désigne le sinus cardinal défini par : ${\rm{sinc}}(x) = \frac{\sin (x)}{x}$.
• c désigne la vitesse de la lumière dans le vide, ${\varepsilon _0}$ la permittivité du vide, et ${\mu _0}$ la perméabilité du vide.
- Formulaire
$\overrightarrow {{\rm{rot}}} \,(f\,\vec A) = f\,\overrightarrow {{\rm{rot}}} \,\vec A + \overrightarrow {{\rm{grad}}} (f)\, \wedge \,\vec A$ (2)
I Modulateur acousto-optique
On considère deux milieux diélectriques, non magnétiques, homogènes et isotropes, d'indices de réfraction n1 et n2 . Le milieu d'indice n1 occupe le demi-espace z < 0 , le milieu d'indice n2 le demi-espace z > 0. Le plan z = 0 constitue ainsi un dioptre plan.
Une onde plane progressive, monochromatique de pulsation ω , se propage dans le milieu d'indice n1 . Le champ électrique ${\vec E_i}$ de cette onde est polarisé rectilignement selon ${\vec e_y}$ ; son vecteur d'onde ${\vec k_i}$ fait avec Oz un angle i (angle d'incidence). On admet que les ondes réfléchies et transmises par le dioptre sont planes, monochromatiques de pulsation ω , de champs électriques ${\vec E_r}$ et ${\vec E_t}$ polarisés selon ${\vec e_y}$.
Les champs électriques, à l'instant t et au point M de l'espace, sont écrits sous la forme
${\vec E_i}(\vec r,t) = {E_0}\,\exp \left[ {i(\omega t - {{\vec k}_i}\,.\,\vec r)} \right]{\vec e_y}$ (3)
${\vec E_r}(\vec r,t) = R\,{E_0}\,\exp \left[ {i(\omega t - {{\vec k}_r}\,.\,\vec r)} \right]{\vec e_y}$ (4)
${\vec E_t}(\vec r,t) = T\,{E_0}\,\exp \left[ {i(\omega t - {{\vec k}_t}\,.\,\vec r)} \right]{\vec e_y}$ (5)
ce qui définit les coefficients de réflexion R et de transmission T en amplitude.
I.A.1 Rappeler, sans les démontrer, les relations de passage du champ électromagnétique à la traversée du dioptre, qu'on exprimera pour $\vec E$ et $\vec B$.
I.A.2 En déduire les lois de la réflexion et de la réfraction de Snell-Descartes (on désignera par i' l'angle de réfraction).
I.A.3 Calculer R en fonction de n1 , n2 , i et i'.
I.A.4 On considère dans toute la suite que les indices n1 et n2 sont très proches, et on pose:
$n = {n_1} \approx {n_2}$ ,$\delta n = {n_2} - {n_1}$ et $\theta = \frac{\pi}{2 - i}$.
Montrer que le coefficient de réflexion s'écrit alors
$R = - \frac{{\delta n}}{{2n{{\sin }^2}(\theta )}}$ (6)
I.B
On se propose maintenant de montrer que l'onde réfléchie sur un dioptre en mouvement voit sa fréquence décalée par effet Doppler.
I.B.1 Le référentiel R étant associé au trièdre (Oxyz), on considère le référentiel R' en translation par rapport à R à la vitesse $ - V{\vec e_z}$ , auquel on associe le trièdre (O'xyz) avec $\overrightarrow {OO'} = - \,Vt{\vec e_z}$ .
La vitesse V est suffisamment faible devant la vitesse c de la lumière pour que l'on puisse négliger les effets relativistes et considérer que le champ électrique en un point M à l'instant t a la même valeur dans les deux référentiels R et R' .
Le champ électrique d'une onde s'écrit dans R :
$\vec E(\vec r,t) = {E_0}\exp \left[ {i(\omega t - \vec k\,.\,\vec r)} \right]{\vec e_y}$ (7)
Montrer que, dans R' , si l'on pose $\vec r' = \overrightarrow {O'M} $ , ce champ peut s'écrire:
$\vec E(\vec r',t) = {E_0}\exp \left[ {i(\omega 't - \vec k'\,.\,\vec r')} \right]{\vec e_y}$ (8)
et déterminer $\omega '$ et $\vec k'$ en fonction de ω , $\vec k$ et V .
I.B.2 Le dioptre considéré en (I.A.) est éclairé dans les mêmes conditions, mais il se translate maintenant à la vitesse $ - V{\vec e_z}$ , par rapport au référentiel R .
Montrer que, dans R , la pulsation ${\omega _r}$ de l'onde réfléchie est différente de la pulsation ${\omega _i}$ de l'onde incidente, et que le décalage $\Delta \omega = {\omega _r} - {\omega _i}$ vaut :
$\Delta \omega = \frac{{2nV\sin (\theta )}}{c}\omega $ (9)
Pour réaliser expérimentalement un dispositif permettant, sur ce principe, de décaler la fréquence d'une onde électromagnétique, on peut utiliser la propagation d'une onde acoustique dans un cristal. Une onde acoustique plane, de fréquence f et de longueur d'onde Λ , se propageant selon Oz dans la direction z < 0, induit une modulation de l'indice de réfraction du cristal autour d'une valeur moyenne nc selon :
$n(z,t) = {n_c} + \Delta n\cos \left[ {2\pi \left( {ft + \frac{z}{\Lambda }} \right)} \right]$ (10)
avec $\Delta n > 0$ et $\Delta n < < {n_c}$. Tournez la page S.V.P.
Pour décrire l'interaction entre l'onde électromagnétique et l'onde acoustique, on adopte le modèle suivant, qui rend correctement compte des observations expérimentales. Le cristal est considéré comme une juxtaposition de petites tranches d'épaisseur $\delta z$ très inférieure à Λ , et donc d'indice pratiquement uniforme. Entre deux tranches successives, il y a un saut d'indice $\delta n = \frac{{\partial n}}{{\partial z}}\delta z$: chaque interface entre deux tranches élémentaires constitue un dioptre plan. Du fait de la propagation de l'onde acoustique, chacun de ces dioptres se déplace à vitesse $\vec V = - \,V{\vec e_z}$ constante.
Le cristal occupe la région de l'espace comprise entre les plans x = -e/2 et x = +e/2 ; on le suppose de grandes dimensions selon Oy et Oz . Le milieu extérieur, homogène, est d'indice na . Les faces x = -e/2 et x = +e/2 subissent un traitement anti-reflets : on considérera que les coefficients de transmission à travers ces faces sont égaux à 1.
On éclaire la face x = -e/2 du cristal par une onde plane, de champ électrique
${\vec E_i}(\vec r,t) = {E_0}\exp \left[ {i(\omega t - {{\vec k}_i}\,.\,\vec r)} \right]{\vec e_y}$ (11)
dont le vecteur d'onde ${\vec k_i}$ fait un angle ${\theta _a}$ avec ${\vec e_x}$.
L'amplitude Δn de la variation d'indice étant très faible devant nc , l'onde réfractée dans le cristal s'y propage presque comme si l'indice était uniformément nc , : elle est quasi plane, de vecteur d'onde ${\vec k_c}$ faisant avec ${\vec e_x}$ un angle ${\theta _c}$ d'amplitude pratiquement constante et égale à E0. Cependant, chaque interface entre deux tranches élémentaires du cristal réfléchit une onde élémentaire, d'amplitude très faible devant E0 (figure 1). Ces ondes élémentaires émergent du cristal en x = +e/2. Leur superposition, dans l'air, constitue l'onde réfléchie.

I.C.2 Les interfaces atteintes par l'onde incidente sont comprises entre z = -L/2 et z = +L/2. Montrer que l'amplitude complexe du champ total réfléchi peut se mettre sous la forme .
$\underset{\scriptscriptstyle-}{E}=K\exp (i\psi )\left\{ \exp \left[ i\alpha (t) \right]\text{sinc}\left[ \pi \text{L}\left( \frac{\text{1}}{\Lambda }-\frac{2{{n}_{a}}\sin ({{\theta }_{a}})}{{{\lambda }_{0}}} \right) \right]-\exp \left[ -i\alpha (t) \right]\text{sinc}\left[ \pi \text{L}\left( \frac{\text{1}}{\Lambda }+\frac{2{{n}_{a}}\sin ({{\theta }_{a}})}{{{\lambda }_{0}}} \right) \right] \right\}$
où K est un réel positif et $\psi $ un déphasage arbitraire dépendant du choix de Σ .
Préciser les expressions de K et α(t) en fonction des données.
I.C.3 Montrer que les deux termes contribuant à l'amplitude du champ réfléchi sont respectivement maximaux pour deux valeurs de ${\theta _a}$ opposées, notées respectivement ${\theta _B}$ et $ - {\theta _B}$ (angles de Bragg). On négligera pour cela la variation de K avec ${\theta _a}$ , et on justifiera a posteriori cette approximation, compte tenu des ordres de grandeur des différents paramètres
$L \approx 1mm$ $\Lambda \approx 50\mu m$ ${n_c} \approx 2$ ${\lambda _0} \approx 600nm$
Représenter l'allure de la variation avec sin(${\theta _a}$) de l'intensité lumineuse émergente.
I.C.5 On envisage séparément ${\theta _a} = + {\theta _B}$ et${\theta _a} = - {\theta _B}$ représentés sur la figure 2 :

$\frac{{\Delta \omega }}{{2\pi }} = \pm f$
avec un signe que l'on précisera pour chacune des deux configurations, et expliquer pourquoi ce décalage de fréquence est cohérent avec le résultat établi à la question (I.B.2).
Il Etude d'un dispositif expérimental
Un interféromètre de Mach-Zehnder, représenté sur la figure 3, est constitué de deux lames semi-transparentes identiques (LE ) et (LS ), et de deux miroirs de renvoi (M1) et (M2).
On éclaire la lame d'entrée (LE) par le faisceau d'un laser hélium-néon, de longueur d'onde dans le vide λ0 = 632, 8 nm et de pulsation $\omega = \frac{2\pi c}{{\lambda }_{0}}$.
Le faisceau transmis par (LE ) traverse ensuite un modulateur acousto-optique, du type de celui étudié dans la première partie, dont l'effet est de décaler la fréquence du rayonnement. Ce modulateur est alimenté par un générateur de radiofréquences (R.F) , de fréquence f = 50 MHz, qui délivre un signal $m(t) = {m_0}\cos (2\pi \,ft)$ . Les ondes acoustiques produites ont ainsi la fréquence f . Comme on l'a montré dans la première partie, l'onde lumineuse émergeant du modulateur a alors pour pulsation $\omega + \Delta \omega $ , avec :
$\Delta \omega = 2\pi \,f$
Le faisceau est ensuite réfléchi sur (M1 ) puis sur (LS ). On désignera dans la suite par "bras de référence" le bras correspondant de l'interféromètre. Dans l'autre bras, que l'on appelera "bras de mesure", le faisceau réfléchi par (LE) est ensuite réfléchi par (M2) puis transmis par (Ls)
Tournez la page S.V.P.

$s(t) = \eta P(t)$ (12)
La fenêtre d'entrée du détecteur est un carré de côté b, orthogonal à Oz et correspondant dans le plan Oxy à -b/2 < x < +b/2 et -b/2 < y < +b/2.
On désigne par ${\vec E_0}$ le champ électrique de l'onde provenant du bras de référence, et par ${\vec E_1}$ le champ provenant du bras de mesure. Au niveau du détecteur, ces deux champs s'écrivent :
${\vec E_0}(\vec r,t) = {E_0}\exp i\left[ {(\omega + \Delta \omega )t - {{\vec k}_0}\,.\,\vec r + {\varphi _0}} \right]{\vec e_y}$ (13)
${\vec E_1}(\vec r,t) = {E_1}\exp i\left[ {\omega t - {{\vec k}_1}\,.\,\vec r + {\varphi _1}} \right]{\vec e_y}$ (14)
On notera I0 et I1 les intensités correspondantes.
II.A.1 On suppose que les deux faisceaux émergeant de l'interféromètre sont parfaitement alignés, se propageant selon Oz. Calculer s(t) en fonction de I0 et I1 et montrer que l'on doit détecter un signal de battement à la fréquence f.
II.A.2 Du fait de l'inévitable imperfection du réglage de l'interféromètre, les faisceaux font en réalité entre eux un petit angle α , au niveau du détecteur. On considérera, par exemple, que l'un des faisceaux arrive sur la fenêtre sous incidence normale et l'autre sous incidence α . Que devient l'amplitude du signal de battement détecté ? Conclure.
II.A.3 La largeur de la fenêtre est b = 2 mm. Quelle valeur de l'angle α entre les deux faisceaux peut-on tolérer pour ne pas être gêné par le problème mis en évidence à la question précédente ? On supposera dans la suite que l'alignement est convenablement réalisé.
II.B
On cherche maintenant à mesurer l'amplitude du signal de battement à l'aide du dispositif électronique schématisé sur la figure 4, qui comprend deux multiplieurs analogiques et un filtre passe-bas de fréquence de coupure fC .
Les signaux d'entrée du premier multiplieur sont le signal s(t) délivré par le photodétecteur et le signal de référence m(t) délivré par le générateur RF qui alimente aussi le modulateur.

II.B.2 Le signal S1 est très sensible aux perturbations extérieures, et peut varier simplement parce que l'on tapote un des miroirs de renvoi de l'interféromètre. Expliquer pourquoi.
Pour remédier à cet inconvénient, on produit un signal S2 à l'aide d'un dispositif électronique parfaitement similaire, mais en remplaçant à l'entrée du premier multiplieur la référence m(t) par $m'(t) = {m_0}\sin (2\pi \,ft)$.
II.B.3 Comment peut-on, en pratique, obtenir le signal $m'(t)$ à partir du signal m(t) ?
II.B.4 Montrer que l'on peut effectivement, en utilisant S1 et S2 , produire un signal S qui ne soit plus aussi sensible aux perturbations extérieures et qui soit toujours proportionnel à I1 .
On introduit dans le bras de mesure de l'interféromètre une cuve remplie d'une suspension de sphères de polystyrène microscopiques dans l'eau (figure 5). L'épaisseur de liquide traversée par le faisceau, dans la direction Oz , est D = 10 cm : la lumière pénètre dans la cuve en z = 0 et en ressort en z = D . L'indice de l'eau pour la longueur d'onde λ0 est ne = 1,33 ; celle du polystyrène np = 1,59. Chaque sphère diffuse la lumière, ce qui confère au liquide un aspect laiteux.
II.C.1 Expliquer pourquoi on n'attend pas, au niveau du détecteur, de signal de battements entre la lumière diffusée par la cuve et le faisceau de référence.
Quel problème de cohérence se pose-t-il ici ? On pourra s'appuyer sur les résultats de (II.A).
On observe cependant un phénomène de battements, mais il correspond aux interférences entre le faisceau de référence et la partie de la lumière qui a traversé la cuve en ligne droite et émerge dans la direction d'incidence. On appelle intensité cohérente IC l'intensité lumineuse correspondant à cette lumière. Le signal S permet de mesurer directement l'intensité cohérente IC à la sortie de la cuve.
Tournez la page S.V.P.

$\frac{{d\,{I_c}(z)}}{{dz}} = - v\,{\sigma _d}\,{I_c}(z)$ (15)
où v est le nombre de sphères par unité de volume et ${\sigma _d}$ la section efficace de diffusion, définie comme le rapport entre la puissance Pd diffusée par une sphère et l'intensité incidente Ic sur cette sphère :
${\sigma _d} = \frac{{{P_d}}}{{{I_c}}}$ (16)
En déduire que l'intensité cohérente Ic(D) à la sortie de la cuve vérifie :
${I_c}(d) = {I_{c0}}\exp ( - v{\kern 1pt} {\sigma _d}{\kern 1pt} D)$ (17)
Que représente ${I_{c0}}$ ?
II.C.3 Le tableau 1 donne les valeurs expérimentales de $\ln \left[ {\frac{{{I_c}(D)}}{{{I_{c0}}}}} \right]$ mesurées pour différentes
valeurs de la fraction volumique de polystyrène, c'est-à-dire du rapport entre le volume de polystyrène et le volume total de la solution :

La section efficace de diffusion ${\sigma _d}$ est fonction de ne , np , λ0 et du volume V des sphères:
${\sigma _d} = 24{\pi ^3}{\left( {\frac{{{n_e}}}{{{\lambda _0}}}} \right)^4}{\left( {\frac{{n_p^2 - n_e^2}}{{n_p^2 + 2n_e^2}}} \right)^2}{V^2}$ (18)
Déterminer le rayon a des sphères utilisées.
II.C.4 Les incertitudes relatives sur les mesures des intensités sont de 1 % ; celles sur les fractions volumiques de 0,5 %. Evaluer l'incertitude Δa sur le rayon des sphères.
III Diffusion de la lumière par une particule sphérique
Dans cette partie, on se propose de justifier l'expression de la section efficace de diffusion ${\sigma _{\rm{d}}}$ utilisée à la question (II.C.3).
On considère une sphère, de rayon a , de polarisation $\vec P$ uniforme, dans le vide. On veut calculer le champ électrostatique créé par cette distribution de polarisation.
III.A.1 Montrer que le champ créé par la polarisation $\vec P$ est identique à celui que créerait une distribution surfacique de charges ${\sigma _{{\rm{lié }}}}$ , que l'on précisera.
III.A.2 Montrer que l'on peut retrouver cette distribution surfacique de charges en superposant deux sphères de même rayon a , uniformément chargées, de densité volumique de charge respectivement + ρ et - ρ, centrées en deux points infiniment voisins, respectivement O+ et O- Etablir la relation liant $\vec P$, ρ , O+ et O- .
III.A.3 Donner l'expression du potentiel électrostatique Vρ créé en tout point M de l'espace par une sphère de rayon a et de centre O, de densité de charge uniforme ρ . On prendra le potentiel nul lorsque M est à l'infini.
III.A.4 Déduire des résultats précédents l'expression du potentiel ${V_{\vec P}}$ à l'intérieur de la sphère uniformément polarisée; montrer que le champ ${\vec E_{\vec P}}$ orrespondant est uniforme et vaut :
${\vec E_{\vec P}} = - \frac{{\vec P}}{{3{\varepsilon _0}}}$ (19)
III.B
On considère maintenant une sphère de polystyrène, de rayon a et de centre O , dans le vide. Le polystyrène est un matériau isotrope, d'indice de réfraction nP ; on notera εp sa permittivité diélectrique absolue.
On envoie sur la sphère une onde électromagnétique plane, monochromatique de pulsation ω, de champ électrique :
${\vec E_i}(\vec r,t) = {\vec E_{i0}}\exp \left[ {i(\omega t - \vec k\,.\,\vec r)} \right]$ (20)
On cherche à déterminer le champ électromagnétique $({\vec E_d},{\vec B_d})$ diffusé par la sphère, et défini par les relations :
$\vec E = {\vec E_i} + {\vec E_d}$ et $\vec B = {\vec B_i} + {\vec B_d}$ (21)
où $(\vec E,\vec B)$ représente le champ électromagnétique total et $({\vec E_i},{\vec B_i})$ le champ incident.
Ecrire les équations de Maxwell pour ces champs.
III.B.2 Exprimer les relations de passage vérifiées par $\vec E$ et $\vec B$ à la surface de la sphère.
III.B.3 Vérifier que, à l'extérieur de la sphère, le champ diffusé $({\vec E_d},{\vec B_d})$ vérifie simplement les équations de Maxwell dans le vide.
Tournez la page S.V.P.
III.B.4 Montrer que, à l'intérieur de la sphère, le champ diffusé vérifie aussi les équations de Maxwell dans le vide, à condition d'y introduire une distribution volumique de courant ${\vec j_{{\rm{lié }}}}$ dont on exprimera l'amplitude complexe ${{\underset{\scriptscriptstyle-}{\vec{j}}}_{\text{li }\!\!\acute{\mathrm{e}}\!\!\text{ }}}$ en fonction de celle du champ total ${\vec E^{{\mathop{\rm int}} }}$ à l'intérieur de la sphère.
III.B.5 Montrer qu'on peut alors considérer le champ diffusé comme le champ créé dans le vide par la distribution de courant ${\vec j_{{\rm{li\'e }}}}$ à condition de rajouter une distribution surfacique de charges ${\sigma _{{\rm{li\'e }}}}$ que l'on déterminera.
III.B.6 Montrer enfin que le champ créé par cette distribution de charges et de courants est équivalent au champ qui serait créé par une sphère polarisée, de polarisation :
$\vec P = ({\varepsilon _p} - {\varepsilon _0}){\vec E^{{\mathop{\rm int}} }}$ (22)
III.C
On introduit le potentiel scalaire Vd et le potentiel vecteur ${\vec A_{\rm{d}}}$ associés au champ diffusé $({\vec E_d}\,,\,{\vec B_d})$.
On impose à ces potentiels de vérifier, en tout point de l'espace, la condition de jauge de Lorentz :
${\rm{div}}\,({\vec A_{\rm{d}}}) + \frac{1}{{{c^2}}}\frac{{\partial {V_{\rm{d}}}}}{{\partial {\rm{t}}}} = 0$ (23)
On montre, à l'aide des équations de Maxwell, que ${{\underset{\scriptscriptstyle-}{\vec{A}}}_{\text{d}}}$ satisfait l'équation
$\Delta \,{{\vec{A}}_{\text{d}}}+{{\mu }_{0}}{{\varepsilon }_{0}}{{\omega }^{2}}{{\vec{A}}_{\text{d}}}=-{{\mu }_{0}}{{\underset{\scriptscriptstyle-}{\vec{j}}}_{\text{li }\!\!\acute{\mathrm{e}}\!\!\text{ }}}$ (24)
dont la solution est :
${{\underset{\scriptscriptstyle-}{\vec{A}}}_{\text{d}}}(\vec{r})=\frac{{{\mu }_{0}}}{4\pi }\iiint_{\text{espace}}{{{{\underset{\scriptscriptstyle-}{\vec{j}}}}_{\text{li }\!\!\acute{\mathrm{e}}\!\!\text{ }}}}(\vec{r}')\frac{\exp (-ik\left\| \vec{r}-\vec{r}' \right\|}{\left\| \vec{r}-\vec{r}' \right\|}{{d}^{3}}r'$ (25)
où k est le nombre d'onde défini par $k = \frac{2 \pi }{\lambda _{0}} = \frac{\omega}{c}$ . La notation d3 r', représente un volume élémentaire autour du point M' tel que $\overrightarrow {OM'} = \vec r'$ .
III.C.1 Cette solution est appelée solution des potentiels retardés. Pourquoi ?
On a vu en (III.B.4.) que ${\vec j_{{\rm{lié }}}}$ était fonction de $\vec E$ , lequel n'est pas connu a priori puisqu'il dépend de ${\vec E_{\rm{d}}}$ qui dépend lui-même de ${\vec A_{\rm{d}}}$ ... La résolution dans le cas général apparaît donc délicate.
On se limite dans toute la suite au cas particulier plus simple où la sphère est de rayon très petit devant la longueur d'onde du rayonnement : a << λ0 . Cette restriction permet, entre autres, de considérer que le champ incident est pratiquement uniforme à l'intérieur de la sphère. Il est alors tentant de chercher, pour $\vec E$ et ${\vec E_{\rm{d}}}$ une solution correspondant à une polarisation $\vec P$ uniforme dans le volume de la sphère. Il faudra évidemment ensuite vérifier à posteriori la compatibilité de la solution obtenue avec cette hypothèse.
que celle correspondant au potentiel électrostatique créé par une sphère uniformément chargée. En déduire l'expression de ${{\underset{\scriptscriptstyle-}{\vec{A}}}_{\text{d}}}^{\operatorname{int}}$ .
III.C.3 Calculer ${{\underset{\scriptscriptstyle-}{V}}_{\text{d}}}^{\operatorname{int}}$ puis les amplitudes complexes ${{\vec{\underset{\scriptscriptstyle-}{E}}}_{\text{d}}}^{\operatorname{int}}$ et ${{\underset{\scriptscriptstyle-}{\vec{B}}}_{\text{d}}}^{\operatorname{int}}$ des champs diffusés.
III.C.4 Exprimer ${\vec E_{\rm{d}}}^{{\mathop{\rm int}} }$ et ${\vec B_{\rm{d}}}^{{\mathop{\rm int}} }$ en fonction du champ incident ${\vec E_i}$ .
Cette solution est-elle cohérente avec l'hypothèse d'uniformité de $\vec P$ ?
IILD
On cherche maintenant à déterminer le champ ${\vec E_{\rm{d}}}$ diffusé en un point M situé à une distance r de la sphère de polystyrène très grande devant la longueur d'onde : r >> λ0 .
III.D.1 Montrer que la solution des potentiels retardés peut alors s'écrire :
${{\underset{\scriptscriptstyle-}{\vec{A}}}_{\text{d}}}(\vec{r})={{\underset{\scriptscriptstyle-}{\vec{A}}}_{0}}\frac{\exp (-ikr)}{r}$ (26)
ou ${{\underset{\scriptscriptstyle-}{\vec{A}}}_{0}}$ est une constante vectorielle que l'on exprimera en fonction de a et ${{\underset{\scriptscriptstyle-}{\vec{j}}}_{\text{li }\!\!\acute{\mathrm{e}}\!\!\text{ }}}$ .
III.D.2 Pour repérer la position du point M , on introduit le système de coordonnées sphériques de pôle O et d'axe polaire Oz , tel que ${{\underset{\scriptscriptstyle-}{\vec{A}}}_{0}}={{A}_{0}}\,{{\vec{e}}_{z}}$ . On a ainsi $\theta = ({\vec A_0},\vec r)$ . Etablir les expressions de ${{\underset{\scriptscriptstyle-}{V}}_{\text{d}}}$ et ${{\underset{\scriptscriptstyle-}{\vec{E}}}_{\text{d}}}$ en projection sur la base $({\vec e_r},\,{\vec e_\theta },\,{\vec e_\varphi })$ associée.
IILD.3 Montrer qu'au voisinage de $\vec r = {\vec r_0}$ , le champ ${\vec E_{\rm{d}}}$ a pratiquement une structure d'onde plane (on posera $\vec r = {\vec r_0} + \vec \delta $) . En déduire que l'intensité moyenne (puissance surfacique moyenne) diffusée dans la direction de $\vec r$ est proportionnelle à ${{\left\| {{{\underset{\scriptscriptstyle-}{\vec{E}}}}_{\text{d}}} \right\|}^{2}}$ avec un coefficient de proportionnalité que l'on exprimera en fonction de c et ε0 .
III.D.5 En utilisant les relations démontrées en (III.D.1), (III.B.4) et (III.C.4), exprimer ${P_d}$ en fonction de ${{\left\| {{{\underset{\scriptscriptstyle-}{\vec{E}}}}_{i}} \right\|}^{2}}$ .
IILD.6 Exprimer l'intensité Ii du champ incident en fonction de ${{\left\| {{{\underset{\scriptscriptstyle-}{\vec{E}}}}_{i}} \right\|}^{2}}$ . On définit la section efficace de diffusion ${\sigma _{\rm{d}}}$ par :
${P_d} = {\sigma _{\rm{d}}}\,{I_i}$ (27)
Montrer que, si V représente le volume de la sphère de polystyrène, on a:
${\sigma _{\rm{d}}} = 24{\pi ^3}\frac{1}{{\lambda _0^4}}{\left( {\frac{{{\varepsilon _p} - {\varepsilon _0}}}{{{\varepsilon _p} + 2{\varepsilon _0}}}} \right)^2}\,{V^2}$ (28)
IILD.7 Comparer le résultat obtenu à l'expression de ${\sigma _{\rm{d}}}$ donnée en (ILC.3).

